You are viewing the Portuguese version of the site, but it has been detected that you are outside of Brazil.
To access the content in English, click here
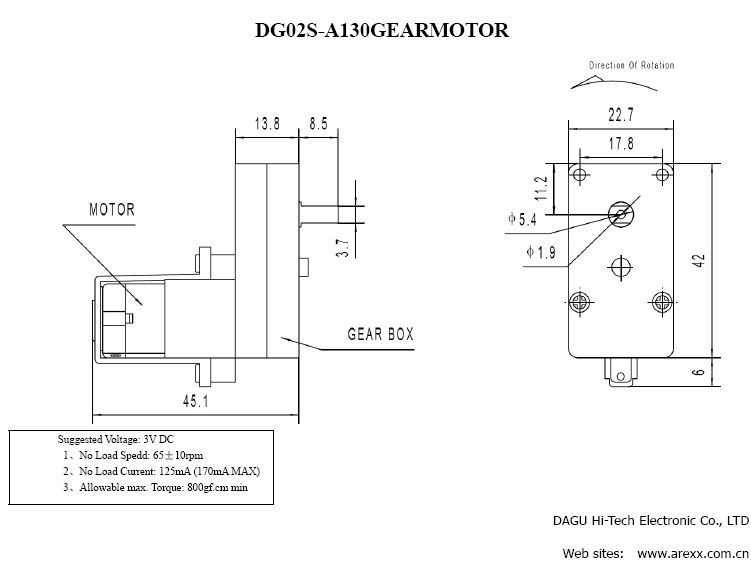
Motor DC 3-6V com Caixa de Redução em Ângulo






Formas de pagamento:
- Pague em até 12x no cartão
- Pague através do PayPal
- Pague por Boleto Bancário
- Pague por PIX
Produtos Relacionados





O motor ideal para seu primeiro robô. Ele já vai com uma caixa de redução em ângulo para se encaixar no projeto.
Vendido individualmente.
Especificações:
- Tensão de alimentação: 3V a 6V
- Corrente em aberto: 200mA @ 6V (130mA @ 6V)
- Corrente de stall: 2A @ 6V (1A @ 3V)
- Relação da caixa de redução: 48:1
- Velocidade: 65RPM @ 3V sem carga
{kind=link}
Para fazer comentários é necessário estar logado. Efetuar login.
Você ainda nao é cadastrado? Cadastre-se agora!

allanveiga.g
 Enviado 2019-06-15 10:20:52
Enviado 2019-06-15 10:20:52
tem previsão de chegada ????????

Giovanni5
Enviado 2019-06-17 09:42:37
allanveiga.g
allanveiga.g
Acabamos de disponibilizar mais unidades para compra.
AbnerFilho
Enviado 2019-05-06 14:12:50
acompanha os parafusos para fixação na base?
Giovanni5
Enviado 2019-05-06 14:33:06
AbnerFilho
AbnerFilho
Caso você esteja se referindo aos parafusos que fixam o motor à caixa de redução através do suporte branco, sim eles acompanham o motor, inclusive, o motor já é vendido fixo, da maneira que é demonstrado na imagem.
spezzievandro
Enviado 2018-04-22 21:54:59
Boa noite tem como fixar esse motor em outro tipo de base? como se fosse uma superficie plana?

hallszombie
Enviado 2018-04-23 08:58:47
spezzievandro
spezzievandro
O motor possui 4 furos que podem ser usados na fixação do mesmo em superfícies planas.
MarianaLellis
Enviado 2017-12-23 20:43:57
Tem previsão de reposição do estoque? Tem previsão de reposição do estoque?

ViniDj
Enviado 2017-12-27 10:56:42
MarianaLellis
MarianaLellis
Previsão para o final de Janeiro. Temos em estoque neste momento a opção com eixo reto que é similar a esse.
Fag_br
Enviado 2017-09-10 18:20:39
Boa noite, Sendo a corrente em aberto de 200mA em 6V, posso alimentá-lo pelo pino de 5V do Arduíno Uno ? Não pretendo colocar nenhuma carga no motor. Grato.

MarceloFarias
Enviado 2017-09-11 09:30:56
Fag_br
Fag_br
Não. Um pino do Arduino UNO pode fornecer no máximo, 40mA. Ainda assim não recomendamos atingir esse valor. Conectar esse motor diretamente no pino do Arduino irá danificá-lo permanentemente.
Fag_br
Enviado 2017-09-11 10:19:45
Fag_br
Fag_br
Bom dia, Entendo que o limite de 40mA são para as saídas digitais, mas li que no terminal de +5V o limite de corrente é de 350 a 500 mA quando alimentado pela USB. Faz sentido? Obrigado.
MarceloFarias
Enviado 2017-09-11 10:45:29
Fag_br
Fag_br
Se estiver alimentando a placa pela USB, a tensão no pino de 5V é fornecida pela porta USB de seu computador. Dependendo da porta pode ou não funcionar, tendo em vista que o motor tem uma corrente de partida um pouco maior que o nominal e algumas portas ou queimam ou acionam uma proteção contra surtos de corrente. A maneira mais segura de tentar fazer isso seria utilizando uma fonte externa de 7 a 12V e aí sim, como a tensão de 5V será provinda do regulador da placa, acredito que não teria problemas em acionar esse motor. Entretanto, é provável que o regulador esquente bastante devido a potência dissipada, fique atento.
Fag_br
Enviado 2017-09-11 12:29:55
Fag_br
Fag_br
Perfeito. Obrigado.
robose
Enviado 2017-08-19 19:38:42
Posso ligar dois desse motores diretamente com 6 pilhas AA(9VDC)? Obg
MarceloFarias
Enviado 2017-08-21 11:19:00
robose
robose
Sim, você pode. Lembre-se apenas que utilizar valores de tensão superiores ao estipulado pelo fabricante pode diminuir a vida útil do motor. Entretanto, é comum utilizarmos esses motores com 6 pilhas AA sem nenhum problema.
cavarcan
Enviado 2017-04-22 15:59:05
Ola, meu carro está funcionando direitinho, porém um motor está indo mais rápido q o outro, como faço p consertar?
código:
#include <SoftwareSerial.h>
SoftwareSerial bluetooth(2, 3);
int incomingByte;
const int motorA = 5; //velocidade motor A - de 0 a 255
const int motorB = 6; //velocidade motor B - de 0 a 255
const int dirA = 7; //direção do motor A - HIGH ou LOW
const int dirB = 8; //direção do motor B - HIGH ou LOW
void setup() {
bluetooth.begin(9600);
pinMode(motorA, OUTPUT);
pinMode(motorB, OUTPUT);
pinMode(dirA, OUTPUT);
pinMode(dirB, OUTPUT);
}
void loop() {
if(bluetooth.available() > 0) {
incomingByte = bluetooth.read();
if(incomingByte == 'f') {
digitalWrite(dirA, HIGH); //SENTIDO DE ROTACAO
digitalWrite(dirB, HIGH);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
if(incomingByte == 'p') {
analogWrite(motorA, 0); //VELOCIDADE
analogWrite(motorB, 0);
}
if(incomingByte == 't') {
digitalWrite(dirA, LOW); //SENTIDO DE ROTACAO
digitalWrite(dirB, LOW);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
if(incomingByte == 'd') {
digitalWrite(dirA, HIGH); //SENTIDO DE ROTACAO
digitalWrite(dirB, LOW);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
if(incomingByte == 'e') {
digitalWrite(dirA, LOW); //SENTIDO DE ROTACAO
digitalWrite(dirB, HIGH);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
}
}
ViniDj
Enviado 2017-04-24 08:33:49
cavarcan
cavarcan
Como os componentes elétricos e mecânicos nunca são exatamente iguais uns dos outros, pode haver diferenças no comportamento, mesmo quando colocado o mesmo código para os dois canais. A maneira mais fácil de contornar o problema é colocar como velocidade máxima de um lado um valor e outro valor para o outro lado. Assim você corrige a velocidade, fazendo com que o robô ande reto.
cavarcan
Enviado 2017-04-20 14:57:49
como faço p clicar uma tecla do celular, mandar p o bluetooth e aquela função ficar se repetindo até outra tecla ser apertada?
esse eh meu código:
#include <SoftwareSerial.h>
SoftwareSerial bluetooth(2, 3);
int incomingByte;
const int motorA = 5; //velocidade motor A - de 0 a 255
const int motorB = 6; //velocidade motor B - de 0 a 255
const int dirA = 7; //direção do motor A - HIGH ou LOW
const int dirB = 8; //direção do motor B - HIGH ou LOW
void setup() {
bluetooth.begin(9600);
pinMode(motorA, OUTPUT);
pinMode(motorB, OUTPUT);
pinMode(dirA, OUTPUT);
pinMode(dirB, OUTPUT);
}
void loop() {
if(bluetooth.available() > 0) {
incomingByte = bluetooth.read();
if(incomingByte == 'f') {
digitalWrite(dirA, HIGH); //SENTIDO DE ROTACAO
digitalWrite(dirB, LOW);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
wait until
}
if(incomingByte == 'p') {
analogWrite(motorA, 0); //VELOCIDADE
analogWrite(motorB, 0);
}
if(incomingByte == 'r') {
digitalWrite(dirA, LOW); //SENTIDO DE ROTACAO
digitalWrite(dirB, HIGH);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
}
}
hallszombie
Enviado 2017-04-20 15:22:10
cavarcan
cavarcan
Olá cavarcan, Você pode usar a função while no lugar da função if. Neste caso esta função executa continuamente determinados comandos "enquanto" a variável não se altere.
cavarcan
Enviado 2017-04-20 15:34:22
cavarcan
cavarcan
Ola, quando fiz isso ele parou de aceitar os próximos comandos e ficava parado naquele
hallszombie
Enviado 2017-04-20 15:38:49
cavarcan
cavarcan
Você deve fazer uma leitura do bluetooth dentro de cada função while para conseguir verificar quando ocorre a mudança do comando.

GRANATO
Enviado 2017-04-13 17:39:25
O eixo é em D de quantos mm?
ViniDj
Enviado 2017-04-13 18:00:25
GRANATO
GRANATO
O eixo não é em formato de D. Ele possui chanfro em dois lados. Você pode ver suas medidas no datasheet, na aba documentação acima.
cavarcan
Enviado 2017-04-09 12:11:19
Essa bateria https://www.robocore.net/loja/produtos/bateria-9v.html carrega dois desses motores?
ViniDj
Enviado 2017-04-10 10:07:10
cavarcan
cavarcan
Você pode usar essa bateria com este motor.
ROBOCORE TECNOLOGIA
A RoboCore foi criada em 2008 com o intuito de incentivar o desenvolvimento tecnologico, fabricando e fornecendo peças para automação e robótica de alta qualidade a preços acessíveis.
RoboCore Tecnologia LTDA
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
NOSSAS REDES SOCIAIS
LINKS ÚTEIS
POLÍTICAS DA LOJA
CENTRAL DE ATENDIMENTO
Formas de Pagamento
AUDITORIA DE SEGURANÇA

Site 100% Seguro
Auditado Diariamente
Auditado Diariamente