Controlando seu RoboARM
Bem-vindo ao tutorial de controle do seu RoboARM
A seguir você irá aprender:- Como fazer a ligação dos servos e joysticks no Sensor Shield V5;
- Fazer o upload do código na placa;
- Como alimentar corretamente todo o conjunto;
- Quais direções do joystick controlam os diferentes movimentos do servo.

Lista completa de produtos
comprar
Braço Robótico RoboARM
R$ 265,90 no PIX

Eletrônica RoboARM
R$ 189,90 no PIX
Conectando os componentes no Sensor Shield V5
Já com a estrutura completa do braço robótico montada e sua placa Arduino fixada na base, encaixe o Sensor Shield V5 no topo de sua placa.Como estamos tratando de um conjunto de 4 servos, precisaremos utilizar o Sensor Shield V5 para alimentar todo o sistema e fornecer a corrente necessária para os servos sem passar pelo regulador de 1 A da placa Arduino (caso você esteja usando o RoboARM com uma Julieta, basta alimentá-la diretamente com uma fonte de pelo menos 3 A que a própria Julieta possui um regulador que irá fornecer até 3 A para os servos).
A conexão dos componentes ficará como na imagem abaixo.
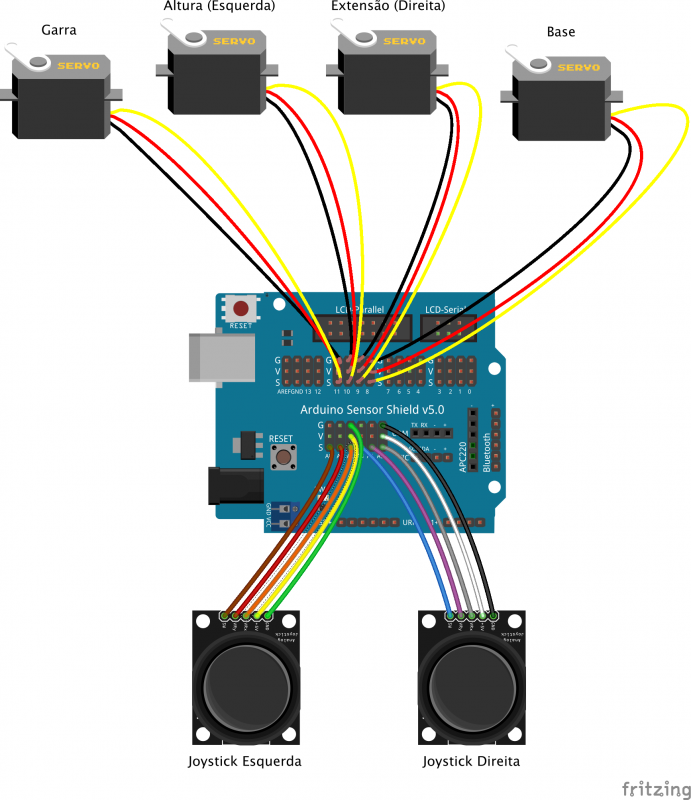
Caso esteja utilizando com uma Julieta: conecte os servos nos pinos A0 até A3 e os direcionais e alimentação dos joysticks nos pinos A4 em diante.
Upload do código na placa
Antes de alimentar o conjunto com a fonte (veremos no próximo passo como alimentar o projeto corretamente), precisamos programar a placa Arduino para controlar os servos do RoboARM. Para isso precisaremos da Arduino IDE 1.8.x no computador, que é o programa que irá fazer o upload do nosso código para a placa.Se essa é sua primeira vez utilizando um Arduino, clique na imagem abaixo para ver o tutorial que irá te ensinar como fazer o download e instalar a Arduino IDE em seu computador.
Caso esteja utilizando com uma Julieta: lembre-se de alterar no código acima os pinos dos servos e joysticks para os novos pinos que estão conectados (servos nos pinos digitais entre 13 e 2 e os direcionais e botões dos joysticks nos pinos analógicos entre A0 e A7).
Antes de fazer o upload do código na placa, certifique-se de que as configurações do menu de ferramentas estão iguais às da imagem abaixo.
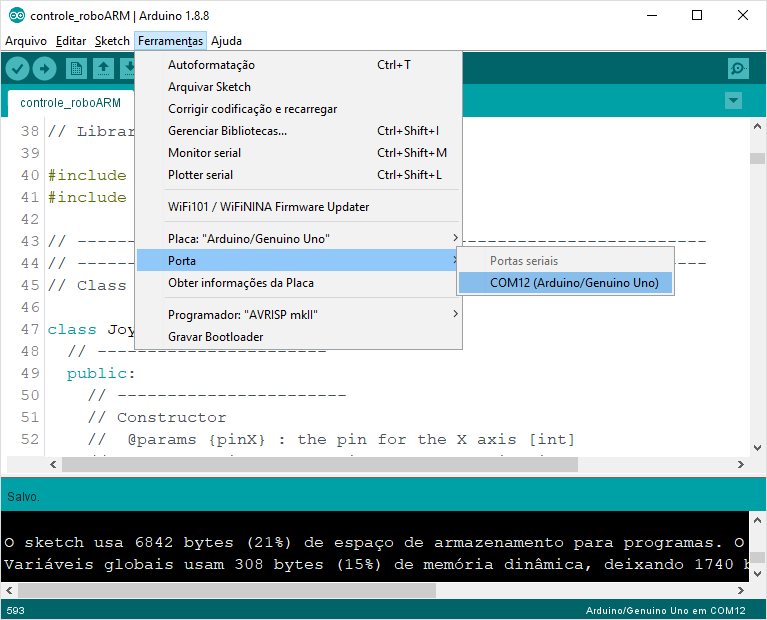
O número atrelado à Porta COM pode mudar de sistema para sistema: fique tranquilo caso o número seja diferente, mas certifique-se de escolher a Porta COM que está conectada sua placa.
Após igualar as configurações, você já pode carregar o código para a sua placa clicando no ícone .


Alimentando o projeto
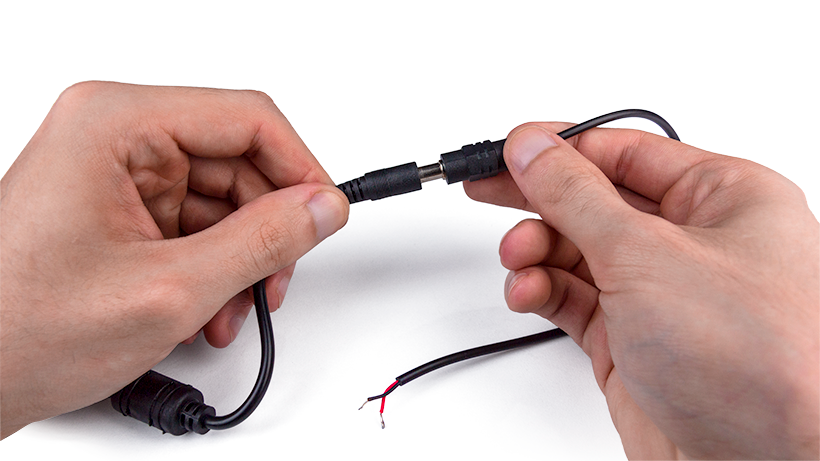
Agora que já carregou o código do braço robótico, desconecte sua placa Arduino do computador para que possamos alimentar o projeto com uma fonte.O pacote Eletrônica RoboARM contém uma Fonte 5V 5A e um Extensor DC P4 Fêmea que você utilizará agora para fornecer energia para todo o Braço Robótico: com a fonte ainda desconectada da tomada, insira o conector P4 da fonte no Extensor DC P4 Fêmea, como na foto abaixo.
Iremos alimentar todo o RoboARM através do borne de conexão do Sensor Shield V5: com a chave Phillips, desaperte os parafusos do borne e insira o fio preto no borne indicado como GND e aperte o parafuso para firmar a conexão. Agora, insira o fio vermelho no borne indicado como VCC e aperte o parafuso para firmar a conexão.
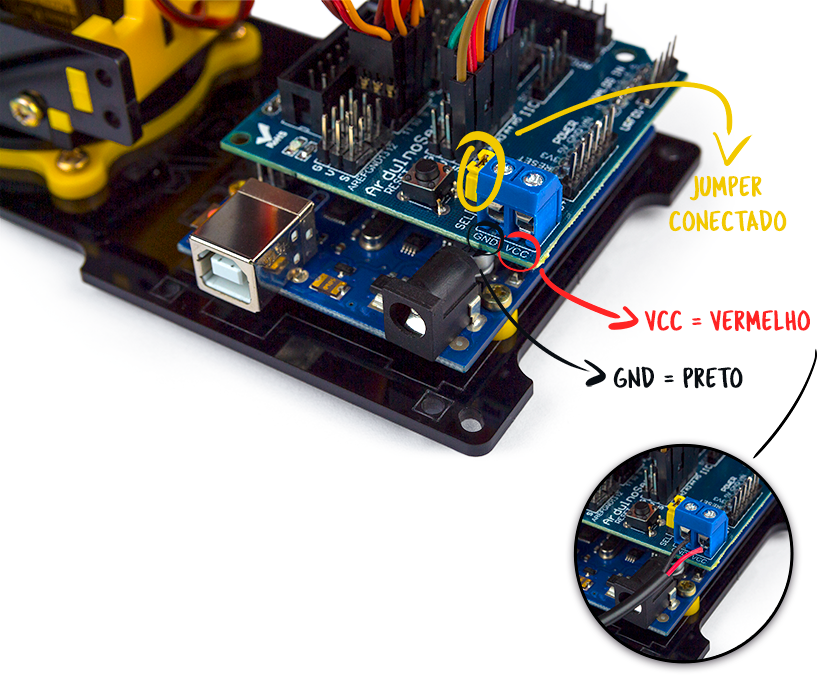
IMPORTANTE: certifique-se de que o jumper esteja conectado nos pinos ao lado do borne para que a fonte alimente todo o sistema.
Hora de se divertir
Já estamos na etapa final! Se você seguiu corretamente os passos anteriores, agora é só conectar sua fonte na tomada para o RoboARM iniciar.Abaixo você confere o que cada joystick irá controlar na movimentação do seu RoboARM.

Boa diversão ;)

