Kit Iniciante Robótica - 4. Software e Drivers
Antes de continuar, você precisará instalar algumas ferramentas em seu computador. Elas serão importantes na hora de compilar e enviar os códigos para seu robô.
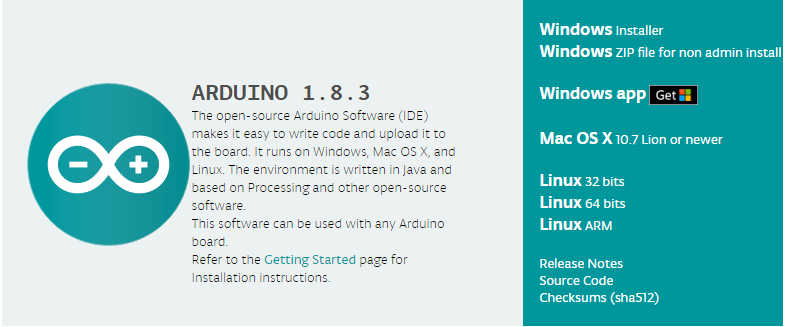
O primeiro passo é instalar a versão mais atual do ambiente de desenvolvimento (IDE) do Arduino, onde todos os código serão desenvolvidos. O ambiente de desenvolvimento pode ser baixado gratuitamente de www.Arduino.cc. Para um passo-a-passo de como realizar a instalação, veja o Tutorial Instalando o Arduino IDE.
Fonte: www.Arduino.cc
O Arduino IDE é um software de código aberto (Open Source), ou seja, todo o seu código fonte está disponível aquipara utilização e que pode ser adaptado para diferentes fins. Todas as vezes que você faz um download na página oficial do software, uma tela aparece solicitando uma doação para ajudar a acelerar o desenvolvimento do projeto. Não é obrigatório doar para baixar, basta clicar em JUST DOWNLOAD para fazer o download sem custo algum.

Fonte: www.Arduino.cc
Depois de instalar o IDE, você precisará instalar o driver da Julieta. Ele é necessário para que seu computador possa reconhecê-la, permitindo enviar os códigos para a placa de seu robô. Basta seguir o tutorial Instalação do Driver da BlackBoard (sim, a Julieta V1.0 e a BlackBoard UNO R3 V1.1 possuem o mesmo circuito de interface USB-Serial, portanto você pode seguir os passos deste tutorial, que a Julieta também será reconhecida corretamente).
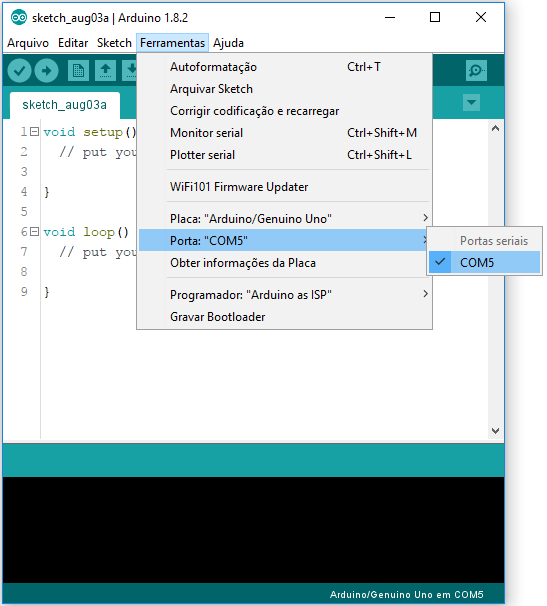
Quando o computador reconhece a placa Arduino, uma porta de comunicação é criada para que a IDE consiga se comunicar com a placa. No Windows você pode verificar a porta criada acessando o Gerenciador de Dispositivos do sistema. Esta porta terá o nome COMx, onde x é um número, e esta porta deverá ser selecionada na IDE do Arduino, no menu Ferramentas > Porta. No Mac esta porta terá um nome como /dev/tty.usbmodem X, onde novamente o x representa um número específico para a porta criada. Ainda no menu Ferramentas, você deverá optar pela sua placa Arduino em Placas. Após selecionar a porta correta, selecione a placa Arduino UNO (já que o bootloader usado no microcontrolador da Julieta é o mesmo do Arduino UNO).
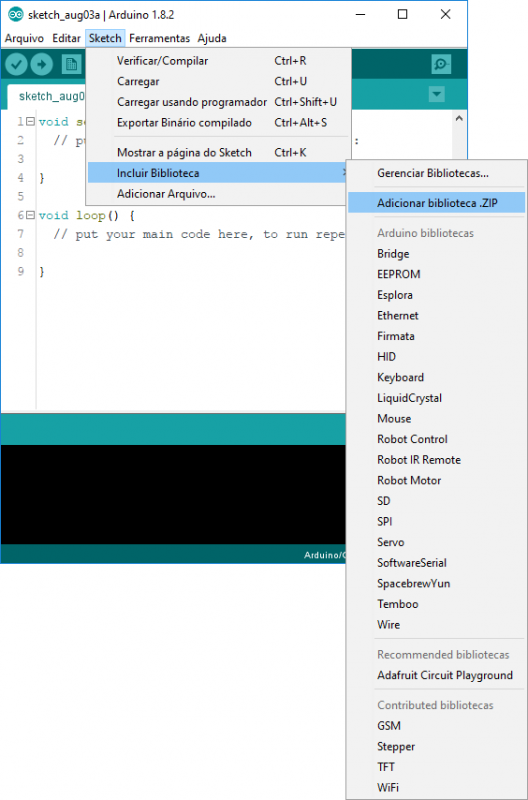
E por último, mas não menos importante, você também precisará instalar em sua Arduino IDE a Biblioteca FalconRobot que contém os exemplos e funções que serão utilizados durante essa apostila.
Para isso, primeiro baixe a biblioteca em seu computador através desse link: Biblioteca FalconRobot. Depois, vá no menu Sketch->Incluir Biblioteca->Adicionar Biblioteca .ZIP e selecione o arquivo você baixou. Você observará uma mensagem informando que a biblioteca foi adicionada às suas bibliotecas a parte inferior da IDE.
Tudo pronto. Agora você está apto a prosseguir para o próximo capítulo!
Instalando o Arduino IDE
O primeiro passo é instalar a versão mais atual do ambiente de desenvolvimento (IDE) do Arduino, onde todos os código serão desenvolvidos. O ambiente de desenvolvimento pode ser baixado gratuitamente de www.Arduino.cc. Para um passo-a-passo de como realizar a instalação, veja o Tutorial Instalando o Arduino IDE.
Fonte: www.Arduino.cc
Fonte: www.Arduino.cc
Instalando o Driver da Julieta
Depois de instalar o IDE, você precisará instalar o driver da Julieta. Ele é necessário para que seu computador possa reconhecê-la, permitindo enviar os códigos para a placa de seu robô. Basta seguir o tutorial Instalação do Driver da BlackBoard (sim, a Julieta V1.0 e a BlackBoard UNO R3 V1.1 possuem o mesmo circuito de interface USB-Serial, portanto você pode seguir os passos deste tutorial, que a Julieta também será reconhecida corretamente).
Quando o computador reconhece a placa Arduino, uma porta de comunicação é criada para que a IDE consiga se comunicar com a placa. No Windows você pode verificar a porta criada acessando o Gerenciador de Dispositivos do sistema. Esta porta terá o nome COMx, onde x é um número, e esta porta deverá ser selecionada na IDE do Arduino, no menu Ferramentas > Porta. No Mac esta porta terá um nome como /dev/tty.usbmodem X, onde novamente o x representa um número específico para a porta criada. Ainda no menu Ferramentas, você deverá optar pela sua placa Arduino em Placas. Após selecionar a porta correta, selecione a placa Arduino UNO (já que o bootloader usado no microcontrolador da Julieta é o mesmo do Arduino UNO).
Instalando a Biblioteca FalconRobot
E por último, mas não menos importante, você também precisará instalar em sua Arduino IDE a Biblioteca FalconRobot que contém os exemplos e funções que serão utilizados durante essa apostila.
Para isso, primeiro baixe a biblioteca em seu computador através desse link: Biblioteca FalconRobot. Depois, vá no menu Sketch->Incluir Biblioteca->Adicionar Biblioteca .ZIP e selecione o arquivo você baixou. Você observará uma mensagem informando que a biblioteca foi adicionada às suas bibliotecas a parte inferior da IDE.
Tudo pronto. Agora você está apto a prosseguir para o próximo capítulo!
